
פרויקטים
< חזרה לכל הפרויקטים
תעשיה
תעשיה כללית
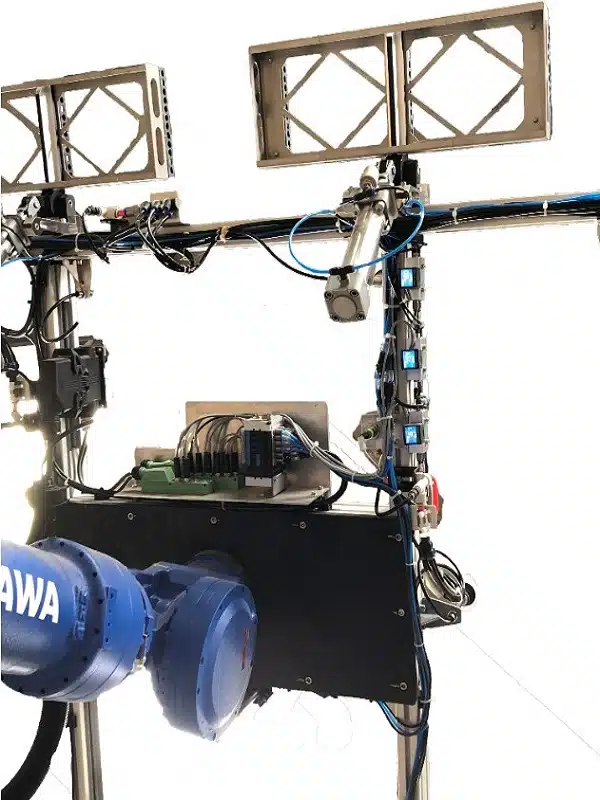
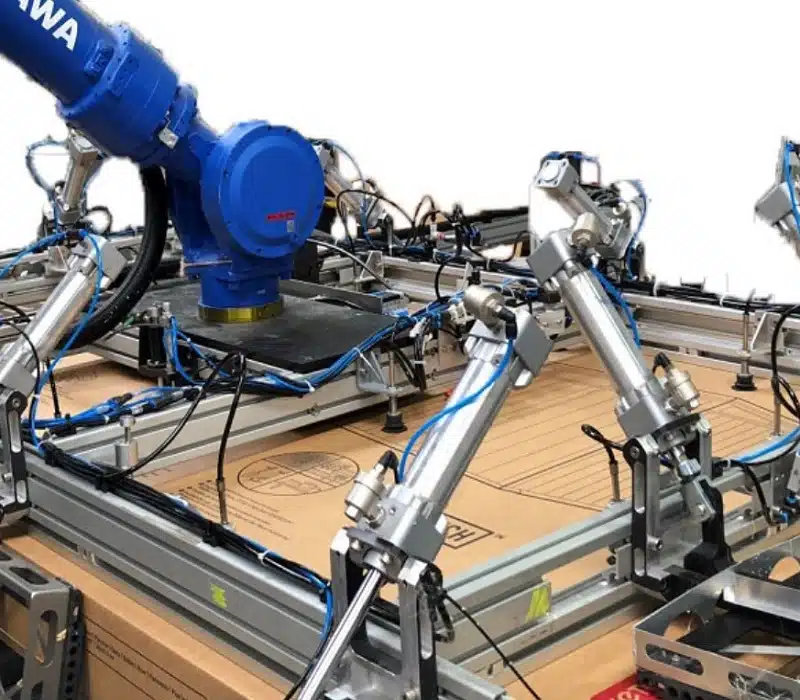
גריפר לרובוט
01
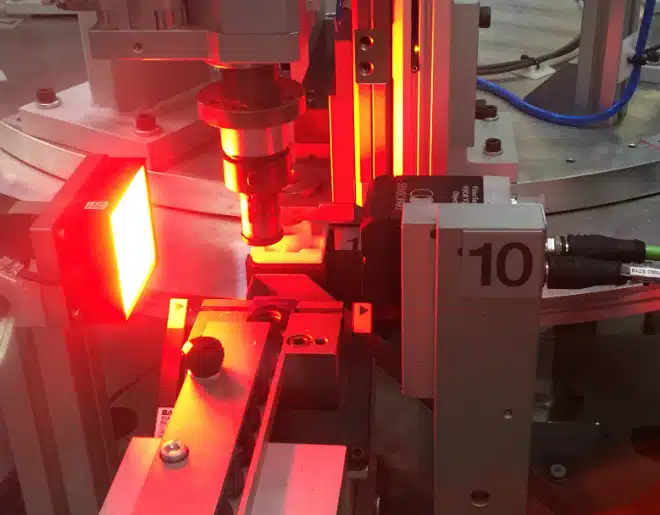
תיאור המכונה:
פיתוח גריפרים לזרועות רובוטיות.
02
אופן הפעולה:
פיתוח גריפרים מותאמים לביצוע פולות מגוונות ,
הגריפר מחובר בקצה הזרוע הרובוטת ונישלט על ידי תוכנה שכתובה ברובוט .
כל גריפר מתוכנן ומיוצר עבור משימה ספציפית.



פרוייקטים נוספים
לכל הפרויקטים
תעשיה כללית
מערכת רב-צירית לבדיקת כרטיסים אלקטרוניים
לקרוא עוד

תעשיה רפואית
מכונות הרכבה בחדרים נקיים
לקרוא עוד
תעשיה כללית
גריפר לרובוט
לקרוא עוד
תעשיה רפואית
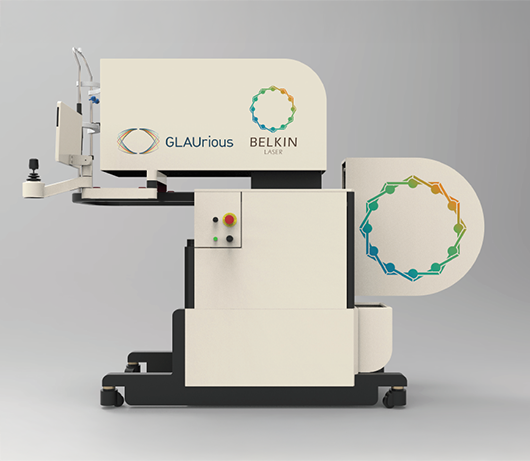
מערכת לטיפול בגלאוקומה
לקרוא עוד

תעשיה רפואית
מכונה לבדיקת איכות בעזרת מצלמות חכמות
לקרוא עוד

תעשיה בטחונית
תא רובוטי למעבדות חומרי נפץ
לקרוא עוד

סטארטאפים
רכב אוטונומי לקטיף עגבניות
לקרוא עוד

תעשיה רפואית
מכונה אוטומטית לספירת טבליות
לקרוא עוד

תעשיה כללית
מכונה להדפסה על קרמיקה
לקרוא עוד
תעשיה רפואית
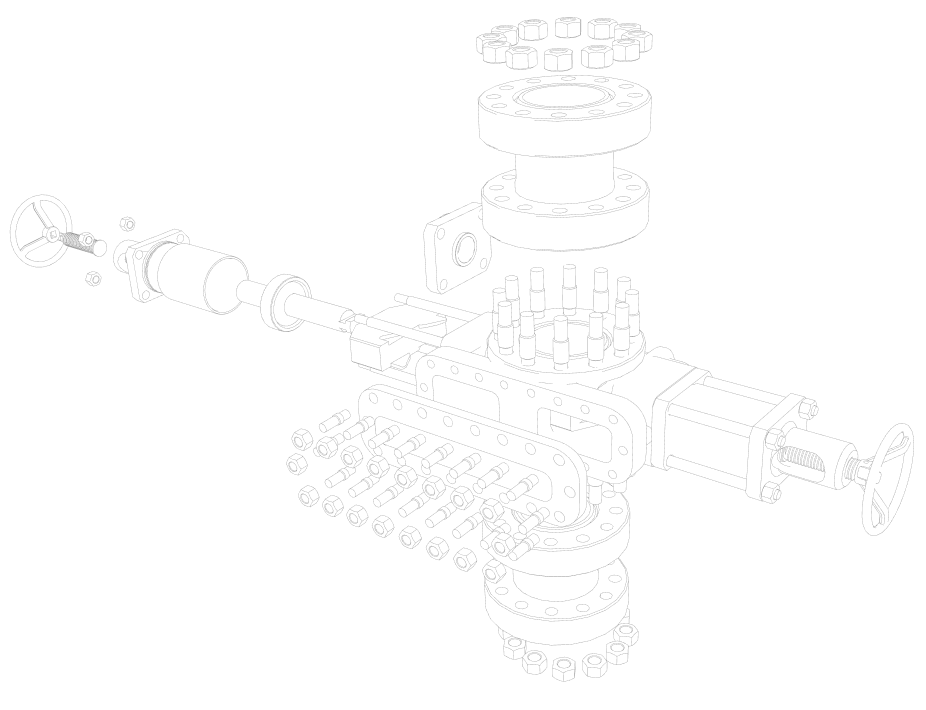
הרכבת שסתום הכולל ארבעה חלקים שונים בקצב מהיר
לקרוא עוד
תעשיה בטחונית
מתקן בדיקה למוצרי פלסטיק
לקרוא עוד

תעשיה כללית
מערכת רב צירית לבדיקת מצלמות תלת מימד
לקרוא עוד

תעשיה רפואית
מכונה להרכבת מזרק רפואי
לקרוא עוד

תעשיה רפואית
מכונה להרכבת מכסה פלסטיק במוצר רפואי
לקרוא עוד

תעשיה כללית
מכונה להרכבת בקבוקים
לקרוא עוד

תעשיה כללית
מכונת פריסת סרט פלדה
לקרוא עוד

תעשיה כללית
מערכת הטבעת תוויות בתבניות פלסטיק המשתלבת בתהליך ההזרקה
לקרוא עוד

תעשיה בטחונית
פלטפורמת ייצוב אוטומטית לרכב אוטונומי
לקרוא עוד

מכונת הרכבה למפסק חשמלי
לקרוא עוד

תעשיה רפואית
מכונה לייצור חומר פולימרי בלתי אריג
לקרוא עוד

תעשיה רפואית
מכונה לשימון מזרק רפואי
לקרוא עוד

תעשיה כללית
מכונה לשריפת אנגוס בחלק מוזרק מפלסטיק
לקרוא עוד

תעשיה כללית
מערך מיקסרים ומסועים
לקרוא עוד

תעשיה בטחונית
מכונה לבדיקת אפודי מגן על ידי הפלת סכין מגובה 5 מטרים
לקרוא עוד

תעשיה כללית
מכונה להרכבת פילטר מיקרוני בתוך וויל פלסטיק
לקרוא עוד

תעשיה כללית
מכונת הזרקה לחומר פולימרי מיוחד
לקרוא עוד

תעשיה רפואית
מכונה לבדיקת אטימות
לקרוא עוד

תעשיה כללית
מכונה לסימון חלקי פלסטיק בלייזר
לקרוא עוד

תעשיה כללית
מערכת רובוטית שני צירים סרוו להוצאת מוצרים ממכונת ואקום פורמינג
לקרוא עוד

תעשיה כללית
מכונה לכבישה צורתית של טבעת פלדה על גוף פלסטיק
לקרוא עוד

סטארטאפים
עמדת שירות ומכירה אוטומטית לטלפונים סלולריים
לקרוא עוד
תעשיה כללית
מכונת הרכבה למנעול חשמלי
לקרוא עוד

תעשיה כללית
מכונת הרכבה לשסתום עם קפיץ
לקרוא עוד

תעשיה כללית
מכונת הרכבה לבית קונקטור מאלומיניום
לקרוא עוד

תעשיה רפואית
מכונה להרכבת וויל פלסטיק למזרק
לקרוא עוד

תעשיה כללית
מכונת הרכבה לשסתום גז
לקרוא עוד

תעשיה כללית
תא רובוטי לכירסום חלקי פלסטיק
לקרוא עוד

תעשיה כללית
מכונת הרכבה לשסתום
לקרוא עוד

תעשיה כללית
קו הרכבה רובוטי מבוסס מסוע פלטות
לקרוא עוד

תעשיה כללית
מכונת הרכבת אינדקס ומערכת מעקב מכאנית
לקרוא עוד

תעשיה רפואית
מכונת הרכבה למזרק (רפואי)
לקרוא עוד

תעשיה כללית
מכונות גלילה – מערכת גלילת סרטי פלדה למכבש אקצנטרי
לקרוא עוד

סטארטאפים
מערכת רובוטית לקטיף תפוחים
לקרוא עוד

תעשיה כללית
מכונת הרכבה מבוססת שולחן אינקדס ומערכות הזנה פנאומטיות
לקרוא עוד

תעשיה כללית
מכונת הרכבה מבוססת שרשרת אינדקס
לקרוא עוד

תעשיה רפואית
מערכת לבדיקת מיקרו מעבדים בטמפרטורות משתנות
לקרוא עוד

תעשיה כללית
מתקן שמירת לחות
לקרוא עוד

תעשיה כללית
קו הרכבה רובוטי
לקרוא עוד

תעשיה כללית
מכונה לבדיקת אירוסולים
לקרוא עוד

תעשיה כללית
מערכת לפריסת סרטי פלדה ופלסטיק
לקרוא עוד

תעשיה כללית
מכבש תריסים
לקרוא עוד

תעשיה כללית
מכונות גלילה – מערכת גלילת סרטי פלדה למכבש אקצנטרי
לקרוא עוד

תעשיה רפואית
מכונה לציפוי מוט טיטניום
לקרוא עוד